SERIE DE PINZAS ELÉCTRICAS HITBOT – Pinza eléctrica colaborativa Z-EFG-C50




Categoría principal
Brazo robótico industrial / Brazo robótico colaborativo / Pinza eléctrica / Actuador intelixente / Solucións de automatización
Aplicación
As pinzas robóticas da serie SCIC Z-EFG teñen un tamaño pequeno e un sistema servo integrado que permite un control preciso da velocidade, a posición e a forza de suxeición. O sistema de agarre de vangarda SCIC para solucións de automatización permitirache abrir novas posibilidades para automatizar tarefas que nunca imaxinaches posibles.

Característica

·Detección de caída da pinza, función de saída de área
·A forza, a posición e a velocidade pódense controlar con precisión a través de Modbus
·Longa vida útil: decenas de millóns de ciclos, superando as garras de aire
·Controlador integrado: tamaño reducido, integración sinxela
·Modo de control: 485 (Modbus RTU), E/S
Carreira de 50 mm, forza de suxeición de 140 N, compatible con brazo robótico de 6 eixes.
Alta frecuencia
O tempo de percorrido máis curto é de 0,5 s
Alta precisión
A repetibilidade é de ±0,03 mm
Alta carga útil
Peso de fixación recomendado ≤2 kg
Conectar e usar
Pinza eléctrica especial para brazo robótico de 6 eixes
Cola cambiable
A súa cola é cambiante, axeitada para varias solicitudes
Forza de suxeición suave
Pode suxeitar obxectos fráxiles e deformados

● Promover unha revolución na substitución das pinzas pneumáticas por pinzas eléctricas, a primeira pinza eléctrica con sistema servo integrado na China.
● Substituto perfecto para compresor de aire + filtro + válvula solenoide + válvula de aceleración + pinza pneumática
● Vida útil de varios ciclos, consistente co cilindro xaponés tradicional



Parámetro de especificación
| Nº de modelo Z-EFG-C50 | Parámetros |
| Golpe total | 50 mm axustable |
| Forza de agarre | 40-140N axustable |
| Repetibilidade | ±0,03 mm |
| Peso de agarre recomendado | ≤2 kg |
| Modo de transmisión | Cremalleira + guía esférica |
| Reposición de graxa de compoñentes móbiles | Cada seis meses ou 1 millón de movementos/tempo |
| Tempo de movemento de trazo unidireccional | 0,5 segundos |
| Modo de movemento | Dous dedos móvense horizontalmente |
| Peso | 1 kg |
| Dimensións (L*A*A) | 72*72*143 mm |
| Tensión de funcionamento | 24 V ± 10 % |
| corrente nominal | 0,8 A |
| corrente máxima | 2A |
| Poder | 20 W |
| Clase de protección | IP20 |
| Tipo de motor | CC sen escobillas |
| Rango de temperatura de funcionamento | 5-55 ℃ |
| Rango de humidade de funcionamento | RH35-80 (Sen xeadas) |

| Carga estática admisible en dirección vertical | |
| Fz: | 300N |
| Par admisible | |
| Mx: | 7 Nm |
| Meu/Miña: | 7 Nm |
| Mz: | 7 Nm |
Condución e controlador integrados
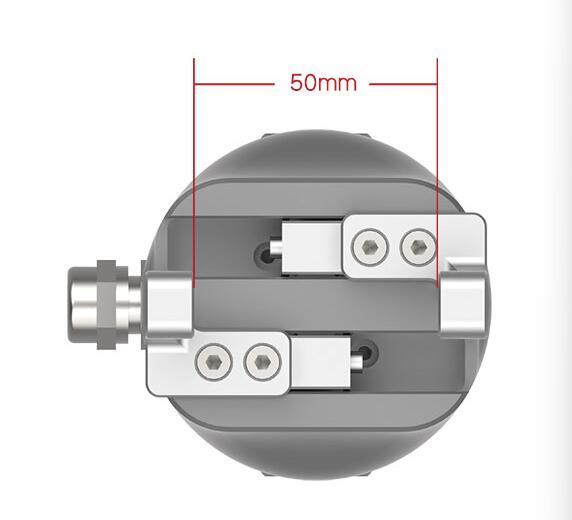
A pinza eléctrica Z-EFG-C50 ten un sistema servo integrado no seu interior, a súa carreira total é de 50 mm, a forza de peche é de 40-140 N, a súa carreira e forza de peche son axustables e a súa repetibilidade é de ±0,03 mm.

Compatible co brazo robótico de seis eixes

A pinza eléctrica pode ser compatible co brazo robótico de 6 eixes, para lograr a función plug and play, o seu tempo de carreira máis curto é de só 0,5 s, o que pode satisfacer as solicitudes de suxeición para unha liña de produción estable.
Tamaño pequeno, flexible para instalar

O Z-EFG-C50 adopta o modo de transmisión de cremalleira + guía de bólas, o tamaño do produto é de 72 mm de longo * 72 mm de ancho * 143 mm de alto, polo que pode ser flexible para colocalo en condicións de pequena área.


Reacción rápida, precisión para o control da forza

O tempo máis curto dun só golpe é de só 0,5 segundos, pode xestionar a tarefa de fixación rápida, as súas pezas de cola pódense cambiar en calquera momento e os clientes poden axustar as colas segundo as necesidades.
Modos de control múltiples, fácil de operar

A configuración do Z-EFG-C50 é sinxela, ten abundantes modos de control, incluíndo 485 (Modbus RTU), Pulso, E/S, e é compatible co sistema de control principal do PLC.

Desprazamento do centro de gravidade da carga
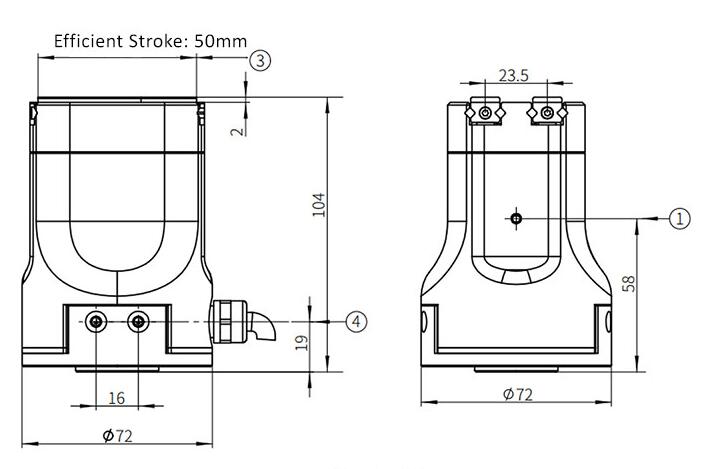
1. Indicador LED
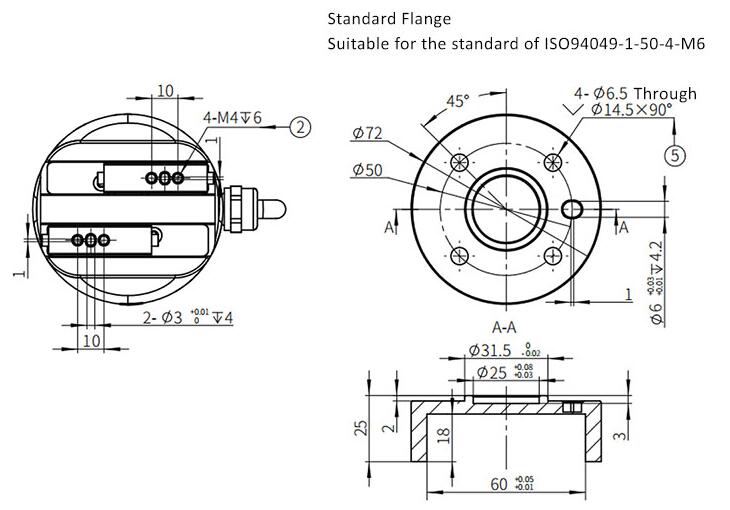
2. Lugar de instalación, use 4 parafusos M4
3. A carreira da pinza eléctrica é de 50 mm
4. Saída da porca
5. Lugar de instalación, use 4 parafusos M6 para conectar coa brida terminal do brazo robótico colaborativo
O noso negocio







