SERIE DE PINZAS ELÉCTRICAS HITBOT – Pinza eléctrica paralela Z-EFG-26



Categoría principal
Brazo robótico industrial / Brazo robótico colaborativo / Pinza eléctrica / Actuador intelixente / Solucións de automatización
Aplicación
As pinzas robóticas da serie SCIC Z-EFG teñen un tamaño pequeno e un sistema servo integrado que permite un control preciso da velocidade, a posición e a forza de suxeición. O sistema de agarre de vangarda SCIC para solucións de automatización permitirache abrir novas posibilidades para automatizar tarefas que nunca imaxinaches posibles.

Característica
·Detección de caída da pinza, función de saída de área
·A forza, a posición e a velocidade pódense controlar con precisión a través de Modbus
·Longa vida útil: decenas de millóns de ciclos, superando as garras de aire
·Controlador integrado: tamaño reducido, integración sinxela
·Modo de control: 485 (Modbus RTU), E/S
A forza de peche e a velocidade poden controlarse con precisión mediante Modbus
Aplicación múltiple
Ten detección de caída de suxeición e saída de distrito
Preciso para controlar
A forza de peche, a broca e a velocidade pódense controlar mediante Modbus
Longa vida útil
Decenas de millóns de ciclos, sobre pinzas pneumáticas
Controlador integrado
Ocupando un espazo pequeno, cómodo para integrarse.
Rápido para reaccionar
O tempo máis curto dun só golpe é de só 0,25 s
Suxeición suave
Pode suxeitar obxectos fráxiles, como ovos, vasos de vidro, etc.




Parámetro de especificación
A Z-EFG-26 é unha pinza paralela eléctrica de dous dedos, de tamaño pequeno pero potente para agarrar moitos obxectos brandos como ovos, tubaxes, compoñentes electrónicos, etc.
● A pinza eléctrica Z-EFG-26 ten un controlador incorporado.
●A súa carreira e forza de agarre son axustables.
●Os terminais pódense substituír para adaptarse a diversos requisitos.
●Recolle facilmente obxectos fráxiles e deformables, como ovos, tubos de ensaio, aneis, etc.
●Adecuado para escenas sen fontes de aire (como laboratorios e hospitais).
| Nº de modelo Z-EFG-26 | Parámetros |
| Total accidente cerebrovascular | 26 mm |
| Forza de agarre | 6~15N |
| Repetibilidade | ±0,02 mm |
| Peso de agarre recomendado | Máx. 0,3 kg |
| Transmisión modo | Cremalleira + guía de rodillos cruzados |
| Reposición de graxa de compoñentes móbiles | Cada seis meses ou 1 millón de movementos/tempo |
| Tempo de movemento de trazo unidireccional | 0,25 segundos |
| Rango de temperatura de funcionamento | 5-55 ℃ |
| Rango de humidade de funcionamento | RH35-80(Sen xeadas) |
| Modo de movemento | Dous dedos móvense horizontalmente |
| Control de golpes | Axustable |
| Axuste da forza de suxeición | Axustable |
| Peso | 0,45 kg |
| Dimensións(L*A*A) | 55*26*97 mm |
| Colocación do controlador | Integrado |
| Poder | 10 W |
| Tipo de motor | CC sen escobillas |
| Corrente máxima | 1A |
| Tensión nominal | 24 V |
| corrente de espera | 0,4 A |
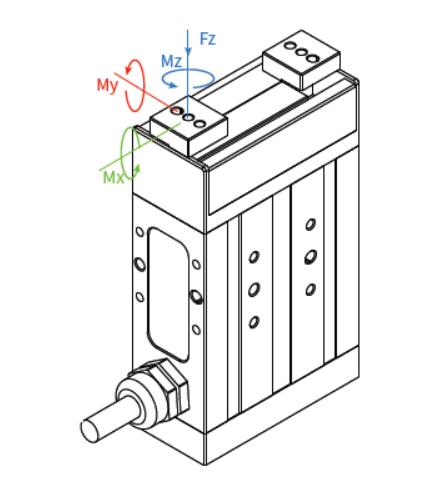
| Carga estática admisible en dirección vertical | |
| Fz: | 250N |
| Par admisible | |
| Mx: | 2,4 Nm |
| Meu/Miña: | 2,6 Nm |
| Mz: | 2 Nm |
Control de forza de precisión Precisión para repetir

A pinza eléctrica adoptou un deseño de transmisión especial e un cálculo de accionamento para compensar, a súa carreira total é de 26 mm, a forza de peche é de 6-15 N, a carreira e a forza de peche pódense axustar e a súa repetibilidade é de ± 0,02 mm.
Reacción rápida, máis estable

O tempo máis curto dun só golpe é de só 0,25 s, o que pode cumprir co requisito de fixación rápida e estable da liña de produción.
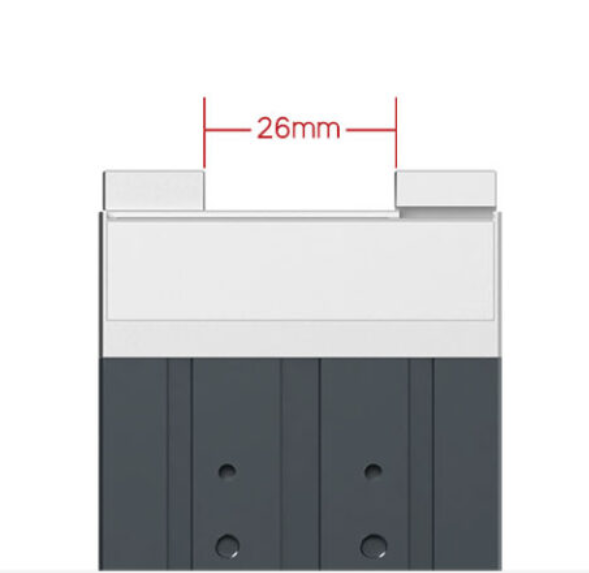
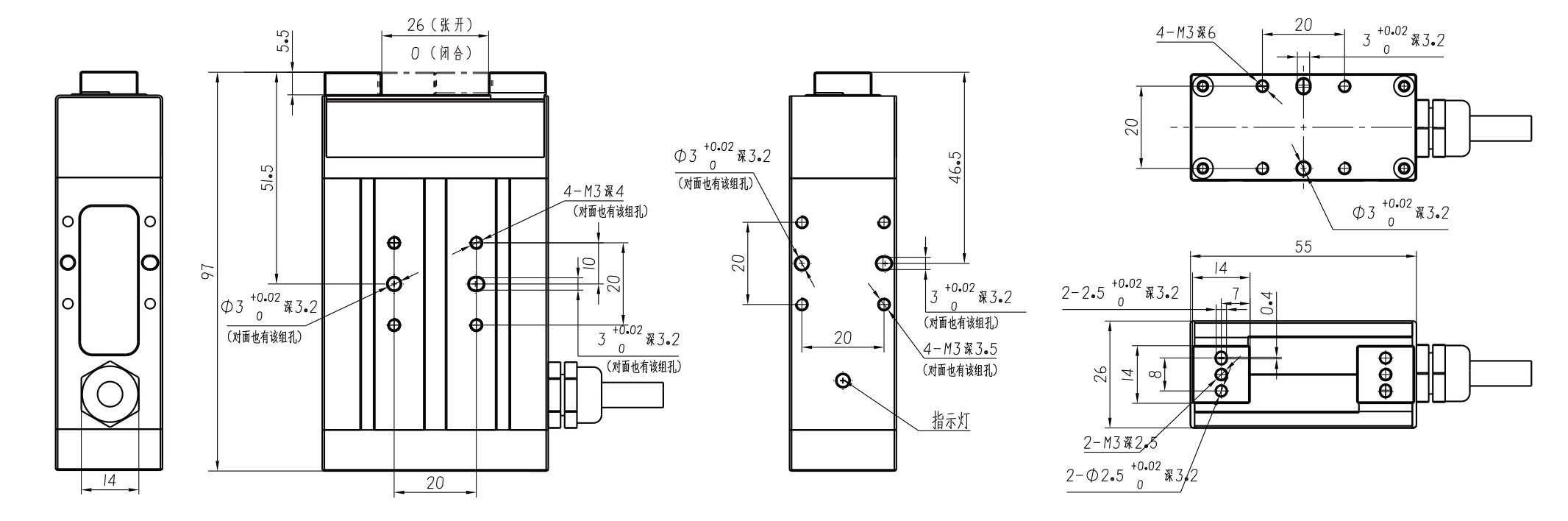
Figura pequena, fácil de integrar

O tamaño do Z-EFG-26 é de 55 mm de longo * 26 mm de ancho * 97 mm de alto, a súa estrutura é compacta e admite máis de cinco modos de instalación flexibles, ten un controlador integrado e ocupa pouco espazo, polo que pode xestionar facilmente moitas tarefas para varios requisitos de fixación.

Control integrado de accionamento e suxeición suave do controlador

A parte traseira da pinza eléctrica pódese cambiar facilmente, o seu peso de suxeición é de 300 g, os clientes poden deseñar especialmente a parte traseira da pinza para que se adapte aos seus propios obxectos de suxeición, para que a pinza eléctrica poida completar as tarefas de suxeición na maior medida posible.
Modos de control múltiple, fáciles de operar

A configuración da pinza Z-EFG-26 é sinxela, ten un abundante modo de control: 485 (Modbus RTU), pulsos, E/S, e é compatible co sistema de control principal do PLC.

Diagrama de instalación de dimensións
O noso negocio







