SERIE DE PINZAS ELÉCTRICAS HITBOT – Pinza eléctrica colaborativa Z-EFG-R



Categoría principal
Brazo robótico industrial / Brazo robótico colaborativo / Pinza eléctrica / Actuador intelixente / Solucións de automatización
Aplicación
As pinzas robóticas da serie SCIC Z-EFG teñen un tamaño pequeno e un sistema servo integrado que permite un control preciso da velocidade, a posición e a forza de suxeición. O sistema de agarre de vangarda SCIC para solucións de automatización permitirache abrir novas posibilidades para automatizar tarefas que nunca imaxinaches posibles.

Característica

·Unha pinza eléctrica con servomotor pequena pero potente.
·Os terminais pódense substituír para cumprir cos diferentes requisitos do proxecto.
·Podería recoller obxectos fráxiles e deformables, como ovos, tubos de ensaio, aneis, etc.
·Adecuado para escenas sen fontes de aire (como laboratorios e hospitais).
Sistema servo integrado solicitado para varias solicitudes
Gran forza de suxeición
Forza de suxeición: 80 N,
carreira: 20 mm
Control de precisión
Repetibilidade: ±0,02 mm
Conectar e usar
Especialmente deseñado parapinza eléctrica de seis eixes
O controlador está integrado
Cobertura de área pequena, cómoda de integrar.
A cola pódese cambiar
A súa cola pódese cambiar para solicitarse segundo varias solicitudes.
Suxeición suave
Pode suxeitar os obxectos fráxiles

● Promover unha revolución na substitución das pinzas pneumáticas por pinzas eléctricas, a primeira pinza eléctrica con sistema servo integrado na China.
● Substituto perfecto para compresor de aire + filtro + válvula solenoide + válvula de aceleración + pinza pneumática
● Vida útil de varios ciclos, consistente co cilindro xaponés tradicional




Parámetro de especificación
A Z-EFG-R é unha pinza eléctrica robótica cun controlador integrado e múltiples funcións nunha soa. Pequena en tamaño, pero potente en función.
● Unha pinza eléctrica con servomotor pequena pero potente.
●Os terminais pódense substituír para cumprir cos diferentes requisitos do proxecto.
● Podería recoller obxectos fráxiles e deformables, como ovos, tubos de ensaio, aneis, etc.
● Adecuado para escenas sen fontes de aire (como laboratorios e hospitais).
Z-EFG-R é unha pequena pinza eléctrica que ten un sistema servo integrado, pode substituír a bomba + filtro + valor magnético electrónico + válvula de mariposa + pinza de aire.
| Nº de modelo Z-EFG-R | Parámetros |
| Golpe total | 20 mm |
| Forza de agarre | 80N |
| Repetibilidade | ±0,02 mm |
| Peso de agarre recomendado | 0,8 kg |
| Modo de transmisión | Cremalleira + guía de rodillos cruzados |
| Reposición de graxa de compoñentes móbiles | Cada seis meses ou 1 millón de movementos/tempo |
| Tempo de movemento de trazo unidireccional | 0,45 segundos |
| Rango de temperatura de funcionamento | 5-55 ℃ |
| Rango de humidade de funcionamento | RH35-80 (sen xeadas) |
| Modo de movemento | Dous dedos móvense horizontalmente |
| Control de golpes | Axustable |
| Axuste da forza de suxeición | Axustable |
| Peso | 0,5 kg |
| Dimensións (L*A*A) | 68*68*132,7 mm |
| Colocación do controlador | Integrado |
| Poder | 5W |
| Tipo de motor | CC sen escobillas |
| Tensión nominal | 24 V |
| corrente máxima | 1A |
| Brazo robótico adaptable de seis eixes | UR, Aubo |
A condución e o controlador están integrados
A Z-EFG-R é unha pequena pinza eléctrica que ten un sistema servo integrado, pode substituír a bomba de aire + filtro + válvula magnética electrónica + válvula de aceleración + pinza de aire.


Compatible co brazo robótico de seis eixes
A pinza pode ser compatible co brazo robótico convencional de seis eixes, para lograr a función plug and play, ten unha carreira de 20 mm de longo, a forza de suxeición é de 80 N, a súa carreira e forza de suxeición pódense axustar.
Figura pequena, flexible para instalar
O tamaño do Z-EFG-R é de 68 mm de longo * 68 mm de ancho * 132,7 mm de alto, a súa estrutura é compacta, admite métodos de instalación múltiple, o controlador está integrado e ocupa pouco espazo, polo que é doado de aplicar para diversas tarefas de fixación.

Reacción rápida, control de precisión
O tempo de movemento máis curto dun só golpe é de 0,45 s, a súa repetibilidade é de ± 0,02 mm, a súa parte traseira pódese cambiar facilmente e os clientes poden suxeitar o obxecto segundo a solicitude.
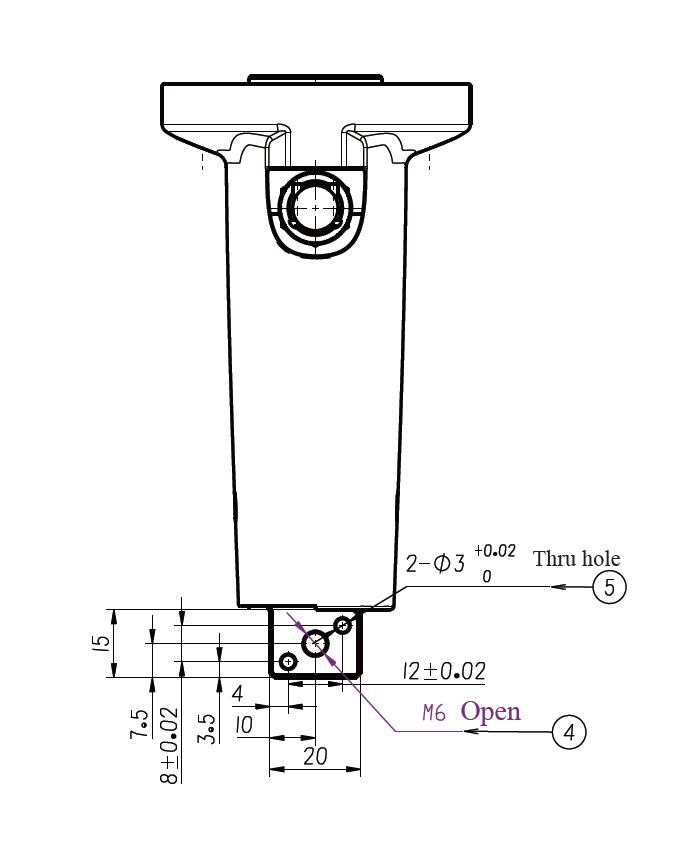
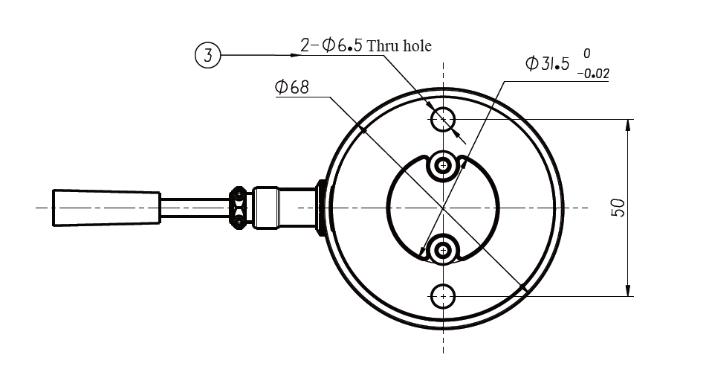
Diagrama de instalación de dimensións
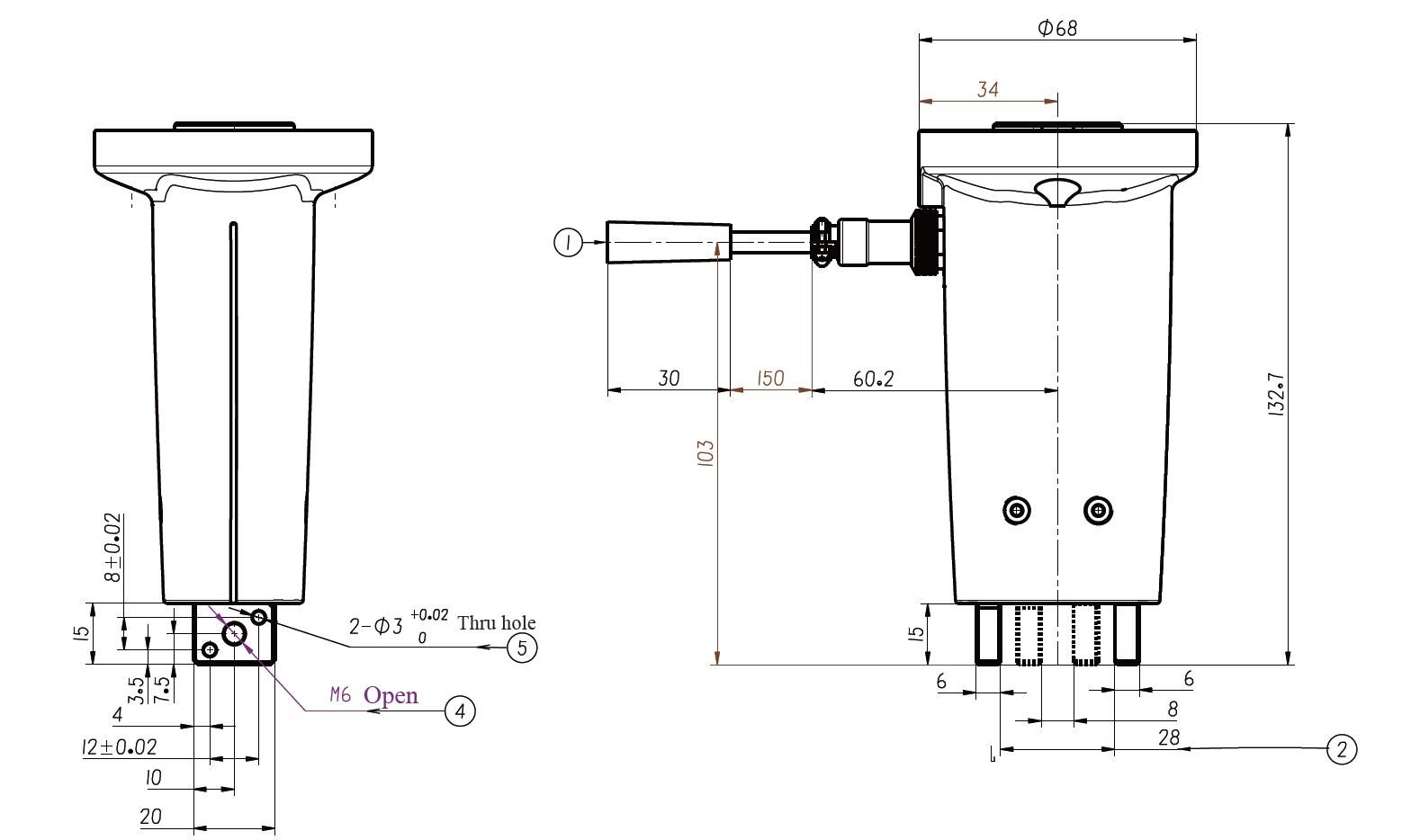
① Conector de aviación de cinco núcleos RKMV8-354 para RKMV8-354
② A carreira da pinza eléctrica é de 20 mm
③ Posición de instalación, use dous parafusos M6 para conectar coa brida no extremo do brazo robótico UR
④ Posición de instalación, posición de instalación do dispositivo de fixación (parafuso M6)
⑤ Posición de instalación, posición de instalación do dispositivo de fixación (3 orificios cilíndricos para pasadores)
Parámetros eléctricos
Tensión nominal 24 ± 2 V
Corrente 0,4 A

O noso negocio







