SERIE DE PINZAS ELÉCTRICAS HITBOT – Pinza eléctrica paralela Z-EFG-20


Categoría principal
Brazo robótico industrial / Brazo robótico colaborativo / Pinza eléctrica / Actuador intelixente / Solucións de automatización
Aplicación
As pinzas robóticas da serie SCIC Z-EFG teñen un tamaño pequeno e un sistema servo integrado que permite un control preciso da velocidade, a posición e a forza de suxeición. O sistema de agarre de vangarda SCIC para solucións de automatización permitirache abrir novas posibilidades para automatizar tarefas que nunca imaxinaches posibles.

Característica

·Controlador integrado
·Curso e forza de agarre axustables
·O extremo pódese substituír para adaptarse a diversas necesidades
·Recolle obxectos fráxiles e deformables como ovos,tubos de ensaio, aneis, etc.
·Aplicar para escenas sen fonte de aire (por exemplo, laboratorio, hospital)
Precisión para controlar, para fixar en espazos pequenos. Rápido e estable para fixar.
Gran forza de suxeición
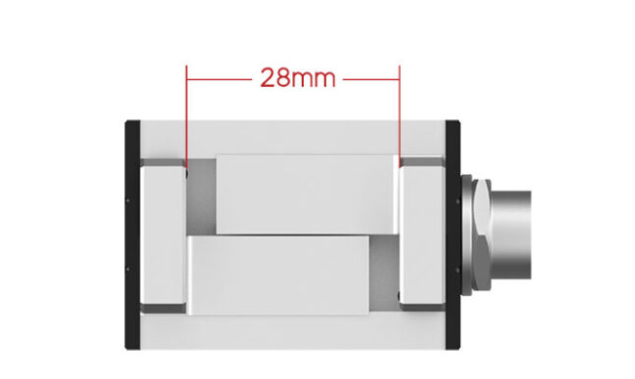
A carreira total é de 20 mm, a forza de suxeición é de 80 N.
Precisión para o control
Repetibilidade: ±0,02 mm
Longa vida útil
Decenas de millóns de ciclos, máis alá dunha pinza neumática
O controlador está integrado
Ocupa pouco espazo, cómodo para integrar.
Modo de control
Controladores de pulso e E/S opcionales
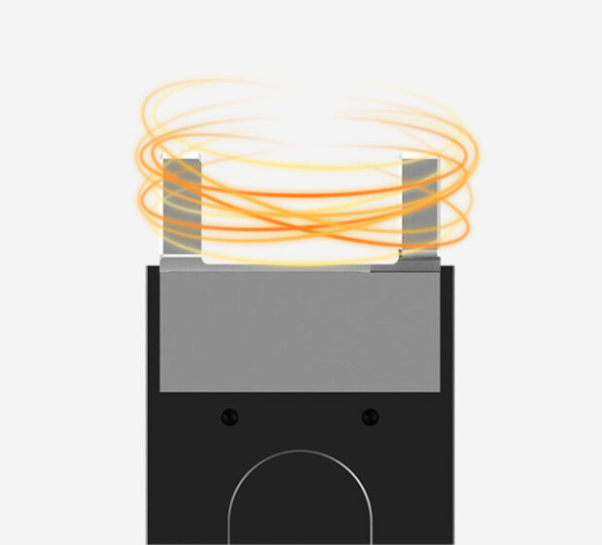
Suxeición suave
Pode suxeitar obxectos fráxiles




Parámetro de especificación
| Nº de modelo Z-EFG-20 | Parámetros |
| Total accidente cerebrovascular | 20 mm |
| Forza de agarre | 30~80N |
| Repetibilidade | ±0,02 mm |
| Peso de agarre recomendado | 0,8 kg |
| Transmisión modo | Cremalleira + guía de rodillos cruzados |
| Reposición de graxa de compoñentes móbiles | Cada seis meses ou 1 millón de movementos/tempo |
| Tempo de movemento de trazo unidireccional | 0,45 segundos |
| Rango de temperatura de funcionamento | 5-55 ℃ |
| Rango de humidade de funcionamento | RH35-80(Sen xeadas) |
| Modo de movemento | Dous dedos móvense horizontalmente |
| Control de golpes | Axustable |
| Axuste da forza de suxeición | Axustable |
| Peso | 0,458 kg |
| Dimensións(L*A*A) | 44*30*124,7 mm |
| Colocación do controlador | Integrado |
| Poder | 5W |
| Tipo de motor | CC sen escobillas |
| Corrente máxima | 1A |
| Tensión nominal | 24 V |
| corrente de espera | 0,2 A |
| Resistente a impactos / resistente a vibracións | 98 m/s |
| Diámetro do motor | 28 mm |
* Forza de agarre Z-EFG-20: A forza de agarre pódese axustar engadindo un material de deformación controlada á parte dianteira da fixación, que se obtén segundo a curva de deformación e forza correspondente.
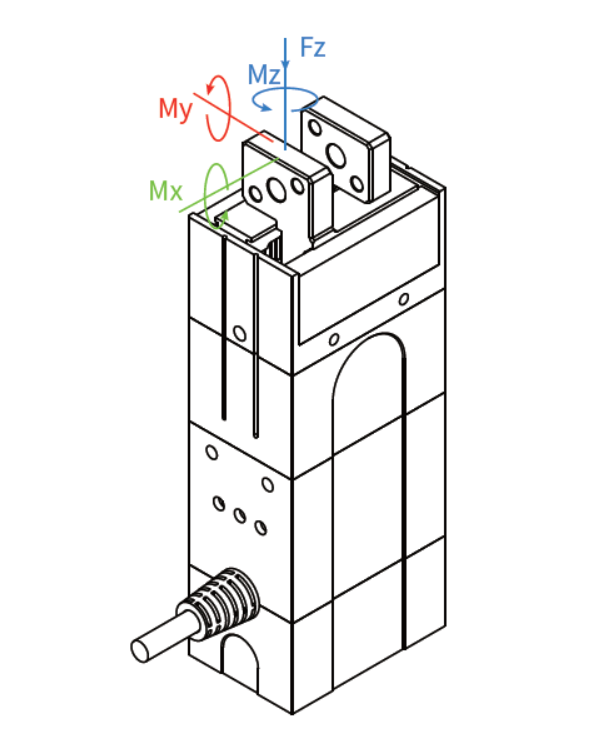
| Carga estática admisible en dirección vertical | |
| Fz: | 150N |
| Par admisible | |
| Mx: | 2,1 Nm |
| Meu/Miña: | 2,34 Nm |
| Mz: | 2 Nm |
Gran forza de suxeición, control preciso da forza

A pinza eléctrica adopta un deseño de transmisión especial e unha compensación de cálculo de accionamento, a súa forza de peche é de 80 N axustable continuamente, a carreira total é de 20 mm e a súa repetibilidade é de ± 0,02 mm.
Modo de movemento e percorrido axustables
O movemento da pinza eléctrica pertence ao movemento paralelo de dous dedos, o seu tempo máis curto dunha soa carreira é de só 0,45 s, peso de suxeición ≤0,8 kg, pode cumprir o requisito de suxeición estable para a liña de produción.
Estrutura compacta, flexible de instalar.

O tamaño do Z-EFG-20 é de 40 mm de longo * 30 mm de ancho * 124,7 mm de alto, a súa estrutura é compacta e admite máis de cinco modos de instalación, o seu controlador está integrado, ocupando un espazo pequeno, o que facilita a realización de diversas tarefas de fixación.


Integración de condución e controlador, fixación suave

A cola do Z-EFG-20 pódese cambiar facilmente, os clientes poden suxeitar os obxectos que soliciten, deseñar a cola e manter a pinza eléctrica para completar as tarefas de suxeición na maior medida posible.
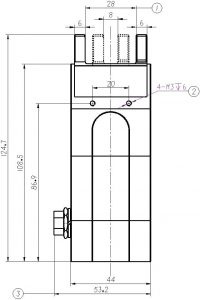
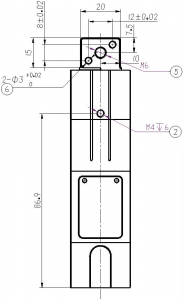
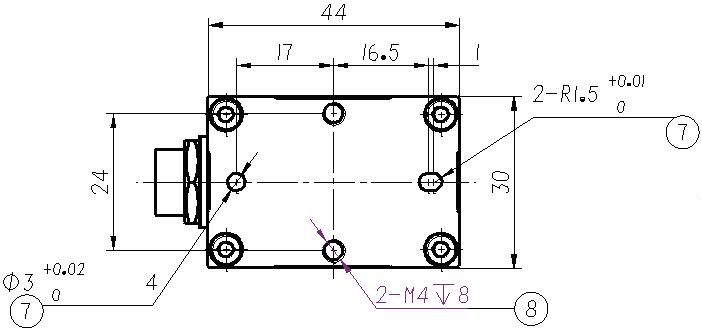
Diagrama de instalación de dimensións
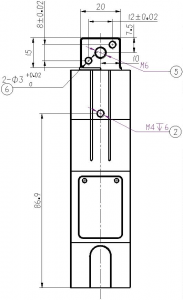
① Movemento dos dedos da pinza
② Posición de montaxe lateral (orificio roscado)
③ Localización do cableado da toma de corrente de aviación
④ Posición da forza de axuste da pinza (esquerda) e luz indicadora (dereita)
⑤ Posición de instalación da pinza (orificio roscado)
⑥ Posición de instalación da pinza (burato do pasador)
⑦ Posición de montaxe inferior (burato do pasador)
⑧ Posición de montaxe inferior ((orificio roscado)
O noso negocio







