BRAZOS ROBÓTICOS SCARA – Brazo robótico colaborativo Z-Arm-4160B





Categoría principal
Brazo robótico industrial / Brazo robótico colaborativo / Pinza eléctrica / Actuador intelixente / Solucións de automatización
Aplicación
Os cobots SCIC Z-Arm son robots colaborativos lixeiros de 4 eixes con motor de accionamento integrado no seu interior e xa non requiren redutores como outros SCARA tradicionais, o que reduce o custo nun 40 %. Os cobots SCIC Z-Arm poden realizar funcións que inclúen, entre outras, a impresión 3D, a manipulación de materiais, a soldadura e o gravado láser. Son capaces de mellorar enormemente a eficiencia e a flexibilidade do seu traballo e produción.
Características

Alta precisión
Repetibilidade
±0,02 mm
Eixo Z personalizado
0,1-0,8 m
Gran carga útil
Soporte de 4 kg
Máximo 5 kg
Maior velocidade
Velocidade lineal máxima 2 m/s
(Carga do soporte 5 kg)
Brazo robótico de gran envergadura e alta precisión de 4 eixes, doado de usar
Alta precisión
Repetibilidade: ±0,02 mm
Envergadura de brazo grande
Eixo J1: 325 mm,Eixo J2: 275 mm
Eixo Z personalizado
O percorrido ascendente e descendente pódese personalizar entre 0,1 m e 0,8 m
Aforro de espazo
A unidade/controlador está integrada
Sinxelo e doado de usar
O recén chegado que non coñecía o brazo robótico tamén pode ser doado de usar, a interface ábrese.
Alta velocidade
A súa velocidade é de 2000 mm/s baixo unha carga de 4 kg

Produtos relacionados



Parámetro de especificación
O SCIC Hitbot Z-Arm 4160B está deseñado por SCIC Tech, é un robot colaborativo lixeiro, doado de programar e usar, compatible con SDK. Ademais, é compatible coa detección de colisións, é dicir, detense automaticamente ao tocar unha persoa, o que supón unha colaboración intelixente entre persoa e máquina, cunha alta seguridade.
| Brazo robótico colaborativo Z-Arm 4160B | Parámetros |
| Lonxitude do brazo dun eixe | 325 mm |
| Ángulo de rotación de 1 eixe | ±90° |
| Lonxitude do brazo de 2 eixes | 275 mm |
| Ángulo de rotación de 2 eixes | ±164° Opcional: 15-345° |
| Carreira do eixe Z | 410 A altura pódese personalizar |
| Rango de rotación do eixe R | ±1080° |
| velocidade lineal | 2000 mm/s (carga útil 4 kg) |
| Repetibilidade | ±0,02 mm |
| Carga útil estándar | 4 kg |
| Carga útil máxima | 5 kg |
| Grao de liberdade | 4 |
| Fonte de alimentación | 220 V/110 V 50-60 Hz adaptado a unha potencia máxima de 48 V CC de 960 W |
| Comunicación | Ethernet |
| Expansibilidade | O controlador de movemento integrado proporciona 24 E/S + expansión baixo o brazo |
| O eixe Z pódese personalizar en altura | 0,1 m~0,8 m |
| Ensino de arrastre do eixe Z | / |
| Interface eléctrica reservada | Configuración estándar: cables de 24*23awg (sen blindaxe) desde o panel do enchufe a través da tapa do brazo inferior Opcional: 2 tubos de baleiro φ4 a través do panel e a brida do encaixe |
| Pinzas eléctricas HITBOT compatibles | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Respirando luz | / |
| Rango de movemento do segundo brazo | Estándar: ±164° Opcional: 15-345° |
| Accesorios opcionais | / |
| Usar o ambiente | Temperatura ambiente: 0-45 °C Humidade: 20-80 % HR (sen xeadas) |
| Entrada dixital do porto de E/S (illada) | 9+3+extensión do antebrazo (opcional) |
| Saída dixital do porto de E/S (illada) | 9+3+extensión do antebrazo (opcional) |
| Entrada analóxica do porto de E/S (4-20 mA) | / |
| Saída analóxica do porto de E/S (4-20 mA) | / |
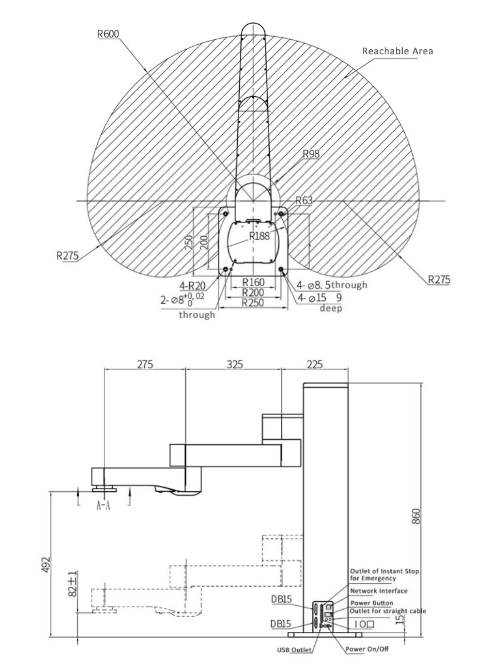
| Altura do brazo robótico | 860 mm |
| Peso do brazo robótico | Peso neto de 36,5 kg con carreira de 410 mm |
| Tamaño da base | 250 mm * 250 mm * 15 mm |
| Distancia entre os orificios de fixación da base | 200 mm * 200 mm con catro parafusos M8 * 20 |
| Detección de colisións | √ |
| Ensino de arrastre | √ |
Selección ideal para tarefas de montaxe lixeiras
O brazo robótico Z-Arm XX60B é un brazo robótico de 4 eixes con gran envergadura, que ocupa unha pequena área, moi axeitado para colocar nun posto de traballo ou dentro dunha máquina, é unha selección ideal para tarefas de montaxe lixeiras.


Lixeiro con gran ángulo de rotación

O peso do produto é duns 36,5 kg, a súa carga máxima pode ser de ata 5 kg, o ángulo de rotación do eixe 1 é de ±90°, o ángulo de rotación dos eixes 2 é de ±164° e o rango de rotación do eixe R pode ser de ata ±1080°.
Gran extensión de brazo, ampla aplicación

O brazo en Z XX60B ten unha longa envergadura de brazo, a lonxitude dun eixe é de 325 mm, a lonxitude dos dous eixes é de 275 mm e a súa velocidade lineal pode chegar aos 2000 mm/s cunha carga de 4 kg.


Flexible de implementación, rápido de cambio
O brazo en Z XX60B ten as características de ser lixeiro, aforro de espazo e flexible de despregar, é axeitado para despregarse en moitas aplicacións e non cambia o deseño de produción anterior, incluíndo a rapidez para cambiar a secuencia do proceso e completar pequenos lotes de produción, etc.
Arrastrar Ensinanza para completar o programa

O software baséase no deseño gráfico e proporciona puntos, sinal de saída, pinza eléctrica, bandexa, retardo, subproceso, reinicio e outros módulos funcionais básicos. Os usuarios poden arrastrar o módulo para controlar o brazo robótico na área de programación. A interface é sinxela, pero a función é potente.
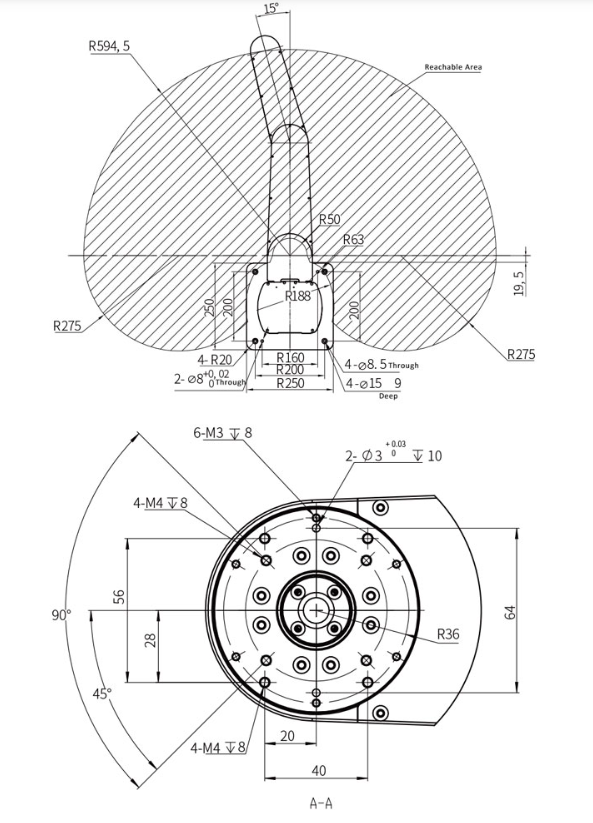
Rango de movemento Versión M1 (rotación cara a fóra)
Recomendación do conector DB15

Modelo recomendado: Macho chapado en ouro con carcasa de ABS YL-SCD-15M Femina chapada en ouro con carcasa de ABS YL-SCD-15F
Descrición do tamaño: 55 mm * 43 mm * 16 mm
(Consultar a Figura 5)
Diagrama do ambiente de uso externo do brazo robótico

O noso negocio


Categorías de produtos
-

SERIE DE CAMBIO RÁPIDO – QC-150 Redondo Manual...
-

ROBOTS DE ELEVACIÓN – Robot de elevación rotatorio SJV...
-

CARRETILLA ELEVADORA INTELIXENTE – SFL-CDD14-CE Laser SLAM ...
-

SERIE DE COBOTS DE IA TM: Cobot de IA de 6 eixes TM12M
-

SERIE DE COBOTS DE IA TM: Cobot de IA de 6 eixes TM16M
-

PINZA ELÉCTRICA SERIE HITBOT – Z-EFG-30 Paral...