SERIE DE CAMBIO RÁPIDO – QCA-200 Un dispositivo de cambio rápido no extremo dun robot


Categoría principal
Cambiador de ferramentas robótico / Cambiador de ferramentas de extremo de brazo (EOAT) / Sistema de cambio rápido / Cambiador de ferramentas automático / Interface de ferramentas robóticas / Lado do robot / Lado da pinza / Flexibilidade de ferramentas / Liberación rápida / Cambiador de ferramentas pneumático / Cambiador de ferramentas eléctrico / Cambiador de ferramentas hidráulico / Cambiador de ferramentas de precisión / Mecanismo de bloqueo de seguridade / Efector final / Automatización / Eficiencia do cambio de ferramentas / Intercambio de ferramentas / Automatización industrial / Ferramentas robóticas de extremo de brazo / Deseño modular
Aplicación
As ferramentas de extremo de brazo (EOAT, polas súas siglas en inglés) úsanse amplamente en industrias como a fabricación de automóbiles, a electrónica 3C, a loxística, o moldeo por inxección, o envasado de alimentos e produtos farmacéuticos e o procesamento de metais. As súas principais funcións inclúen a manipulación de pezas, a soldadura, a pulverización, a inspección e o cambio rápido de ferramentas. A EOAT mellora significativamente a eficiencia da produción, a flexibilidade e a calidade do produto, o que a converte nunha parte esencial da automatización industrial moderna.
Característica
Alta precisión
O lado da pinza de axuste do pistón desempeña a función de posicionamento, o que proporciona unha alta precisión de posicionamento repetido. As probas dun millón de ciclos mostran que a precisión real é moito maior que o valor recomendado.
Alta resistencia
O pistón de bloqueo con gran diámetro de cilindro ten unha forte forza de bloqueo, o dispositivo rápido do extremo do robot SCIC ten unha forte capacidade antipar. Ao bloquear, non haberá tremores debido ao movemento a alta velocidade, evitando así fallos de bloqueo e garantindo a precisión do posicionamento repetido.
Alto rendemento
O mecanismo de bloqueo con deseño de superficie multicónica, compoñentes de selado de longa duración e sonda de contacto elástica de alta calidade están adoptados para garantir o contacto próximo do módulo de sinal.



Parámetro de especificación
| Serie de cambio rápido | ||||
| Modelo | Carga útil máxima | Ruta de gas | Forza de bloqueo a 80 psi (5,5 bar) | Peso do produto |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,4 kg |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,3 kg |
| QCA-15 | 15 kg | 6-M5 | 1150N | 0,3 kg |
| QCA-25 | 25 kg | 12-M5 | 2400N | 1,0 kg |
| QCA-35 | 35 kg | 8-G1/8 | 2900N | 1,4 kg |
| QCA-50 | 50 kg | 9-G1/8 | 4600N | 1,7 kg |
| QCA-S50 | 50 kg | 8-G1/8 | 5650N | 1,9 kg |
| QCA-100 | 100 kg | 7-G3/8 | 12000N | 5,2 kg |
| QCA-S100 | 100 kg | 5-G3/8 | 12000N | 3,7 kg |
| QCA-S150 | 150 kg | 8-G3/8 | 12000N | 6,2 kg |
| QCA-200 | 300 kg | 12-G3/8 | 16000N | 9,0 kg |
| QCA-200D1 | 300 kg | 8-G3/8 | 16000N | 9,0 kg |
| QCA-S350 | 350 kg | / | 31000N | 9,4 kg |
| QCA-S500 | 500 kg | / | 37800N | 23,4 kg |

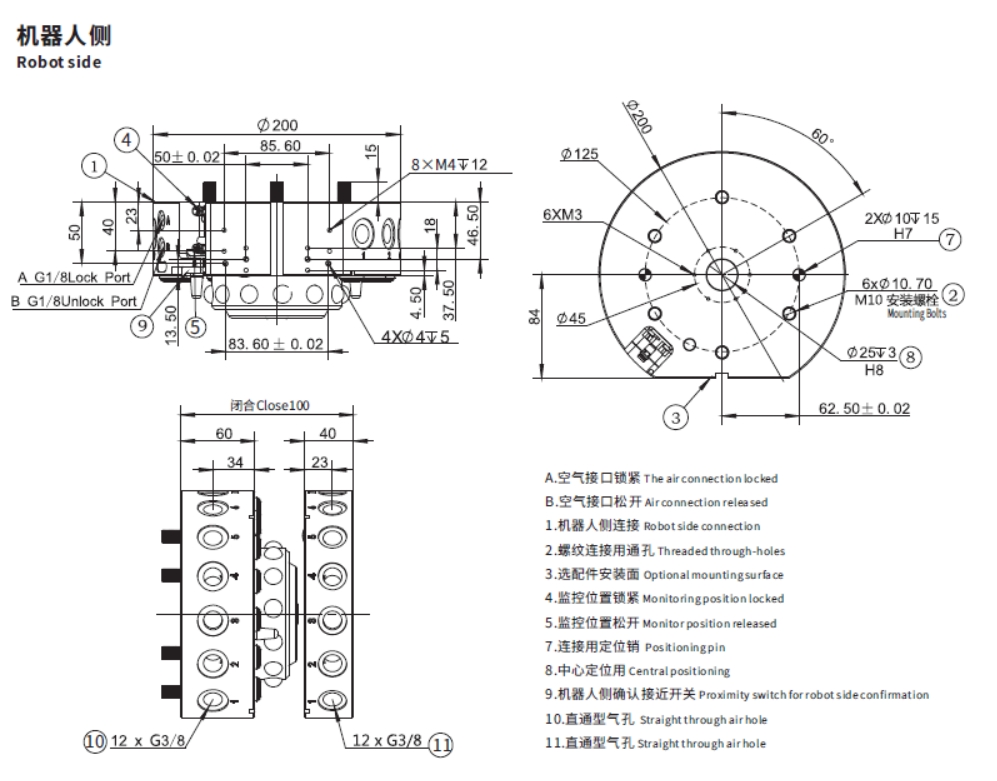
Lado do robot

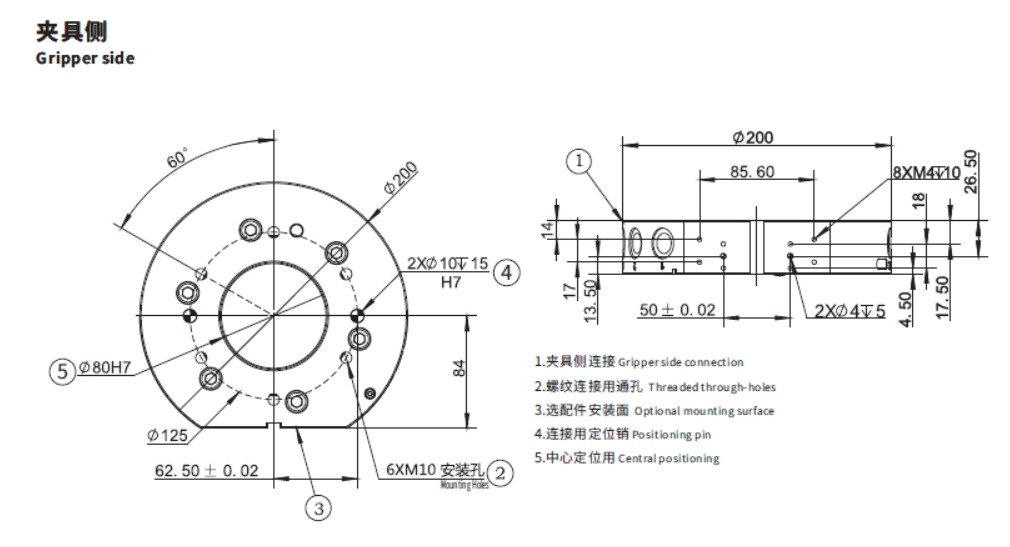
Lado da pinza
Módulo aplicable
Tipo de módulo
| Nome do produto | Modelo | PN | Tensión de traballo | corrente de traballo | Conector | Conector PN |
| Módulo de sinalización lateral do robot | QCSM-15R2 | 7.Y00468 | 24 V | 2,5 A | D-Sub15R2-10001. | 1.Y10080 |
| Módulo de sinalización lateral da pinza | QCSM-15G2 | 7.Y00469 | 24 V | 2,5 A | D-Sub15G2-10001. | 1.Y10081 |
| Módulo de sinalización lateral do robot | QCSM-08R | 7.Y00477 | 380 V | 30A | 3108A22-23S2. | 1.Y10710 |
| Módulo de sinalización lateral da pinza | QCSM-08G | 7.Y00478 | 380 V | 30A | 3108A22-23P2. | 1.Y10711 |
| Módulo de sinalización lateral do robot | QCSM-19R | 7.Y00954 | 220 V | 3A | MS3116F14-19S/-Y2. | 1.Y11420 |
| Módulo de sinalización lateral do robot | QCSM-19R | 7.Y00954 | 220 V | 3A | CMB08E-14-19S(072)SR-B2. | 1.Y11863 |
| Módulo de sinalización lateral do robot | QCSM-19R1 | 7.Y02123 | 220 V | 3A | MS3116F14-19S/-Y2. | 1.Y11420 |
| Módulo de sinalización lateral do robot | QCSM-19R1 | 7.Y02123 | 220 V | 3A | CMB08E-14-19S(072)SR-B2. | 1.Y11863 |
| Módulo de sinalización lateral da pinza | QCSM-19G | 7.Y00955 | 220 V | 3A | MS3116F14-19P/-Y2. | 1.Y11419 |
| Módulo de sinalización lateral da pinza | QCSM-19G | 7.Y00955 | 220 V | 3A | CMB08E-14-19P(072)SR-B2. | 1.Y11864 |
| Módulo de sinalización lateral do robot | QCSM-26R | 7.Y00464 | 220 V | 3A | MS3116F16-26S/-Y2. | 1.Y11867 |
| Módulo de sinalización lateral do robot | QCSM-26R | 7.Y00464 | 220 V | 3A | CMB08E-16-26S(072)SR-B2. | 1.Y11865 |
| Módulo de sinalización lateral da pinza | QCSM-26G | 7.Y00465 | 220 V | 3A | MS3116F16-26P/-Y2. | 1.Y11369 |
| Módulo de sinalización lateral da pinza | QCSM-26G | 7.Y00465 | 220 V | 3A | CMB08E-16-26P(072)SR-B2. | 1.Y11866 |
| Módulo de sinalización lateral da pinza | QCSM-21/26G | 7.Y02117 | 220 V | 3A | MS3116F16-26P/-Y2. | 1.Y11369 |
| Módulo de sinalización lateral da pinza | QCSM-21/26G | 7.Y02117 | 220 V | 3A | CMB08E-16-26P(072)SR-B2. | 1.Y11866 |
| Módulo de sinalización lateral do robot | QCSM-32R | 7.Y02095 | 220 V | 3A | MS3116F22-36S2. | 1.Y13392 |
| Módulo de sinalización lateral do robot | QCSM-32R | 7.Y02095 | 220 V | 3A | MS3118F22-36S2. | 1.Y13393 |
| Módulo de sinalización lateral da pinza | QCSM-32G | 7.Y02096 | 220 V | 3A | MS3116F22-36P2. | 1.Y13394 |
| Módulo de sinalización lateral da pinza | QCSM-32G | 7.Y02096 | 220 V | 3A | MS3118F22-36P2. | 1.Y13395 |
①A lonxitude do cable é de 1 metro ②Só a unión, sen fíos
Módulo de extensión pneumática
| Nome do produto | Modelo | PN | Camiño de gas | Buraco roscado |
| Módulo de extensión pneumática do lado do robot | QCAM-06G18R | 7.Y01015 | 6 | G1/8 |
| Módulo de extensión pneumática do lado da pinza | QCAM-06G18G | 7.Y01016 | 6 | G1/8 |
| Módulo de extensión pneumática do lado do robot | QCAM-06G18R-E | 7.Y01018 | 6 | G1/8 |
| Módulo de extensión pneumática do lado da pinza | QCAM-06G18G-E | 7.Y01019 | 6 | G1/8 |
| Módulo de extensión pneumática do lado do robot | QCAM-10M5R | 7.Y01053 | 10 | M5 |
| Módulo de extensión pneumática do lado da pinza | QCAM-10M5G | 7.Y01054 | 10 | M5 |
| Módulo de extensión pneumática do lado do robot | QCAM-14M5R | 7.Y01055 | 14 | M5 |
| Módulo de extensión pneumática do lado da pinza | QCAM-14M5G | 7.Y01056 | 14 | M5 |
| Módulo de extensión pneumática autoproclamado do lado do robot | QCAM-06G18R-F | 7.Y02005 | 6 | G1/8 |
| Módulo de extensión neumática autoproclamado no lado da pinza | QCAM-06G18G-F | 7.Y02006 | 6 | G1/8 |
| Módulo de extensión pneumática do lado do robot | QCAM-04G38R | 7.Y02043 | 4 | G3/8 |
| Módulo de extensión pneumática do lado da pinza | QCAM-04G38G | 7.Y02044 | 4 | G3/8 |
Tipo de módulo de alta frecuencia
| Nome do produto | Modelo | PN | Tensión de traballo | corrente de traballo |
| Módulo de sinalización do lado do robot | QCHFM-E14-C1R | 7.Y02003 | 1,4 KV | 5A |
| Módulo de sinalización do lado da pinza | QCHFM-E14-C1G | 7.Y02004 | 1,4 KV | 5A |
Módulo de sinal (interface de cable de rede)
| Nome do produto | Modelo | PN |
| Módulo de sinalización lateral do robot | QCSM-RJ45-06R | 7.Y02007 |
| Módulo de sinalización lateral da pinza | QCSM-RJ45-06G | 7.Y02008 |
Módulo de potencia servo
| Nome do produto | Modelo | PN |
| Módulo de potencia do servo do lado do robot | QCSM-08R1 | 7.Y02080 |
| Módulo de potencia do servo do lado da pinza | QCSM-08G1 | 7.Y02081 |
Módulo de sinal servo
| Nome do produto | Modelo | PN |
| Módulo de sinal servo do lado do robot | QCSM-12R | 7.Y02082 |
| Módulo de sinal servo do lado da pinza | QCSM-12G | 7.Y02083 |
Módulo de aire fluído autosellante
| Nome do produto | Modelo | PN |
| Módulo de sinalización lateral do robot | QCWM-02R | 7.Y02049 |
| Módulo de sinalización lateral da pinza | QCWM-02G | 7.Y02050 |
O noso negocio







