Brazo robótico colaborativo robótico industrial de 6 eixes para envasado


Brazo robótico colaborativo robótico industrial de 6 eixes para envasado
Categoría principal
AGV AMR / elevación con gato AGV AMR / vehículo guiado automático AGV / robot móbil autónomo AMR / coche AGV AMR para manipulación industrial de materiais / fabricante chinés de robots AGV / almacén AMR / elevación con gato AMR con láser navegación SLAM / robot móbil AGV AMR / chasis AGV AMR con láser navegación SLAM / robot loxístico intelixente
Aplicación

Chasis non tripulado da serie AMB O chasis AMB (Auto Mobile Base) para vehículos autónomos agv, un chasis universal deseñado para vehículos autónomos guiados por agv, ofrece algunhas funcións como a edición de mapas e a navegación por localización. Este chasis non tripulado para carro agv proporciona interfaces de ampla extensión, como E/S e CAN, para montar varios módulos superiores xunto cun potente software cliente e sistemas de envío para axudar aos usuarios a completar rapidamente a fabricación e a aplicación de vehículos autónomos agv. Hai catro orificios de montaxe na parte superior do chasis non tripulado da serie AMB para vehículos autónomos guiados por agv, que admite a expansión arbitraria con gatos elevados, rolos, manipuladores, tracción latente, pantallas, etc. para lograr múltiples aplicacións dun só chasis. AMB xunto coa dixitalización mellorada para empresas SEER pode realizar o envío e o despregamento unificados de centos de produtos AMB ao mesmo tempo, o que mellora enormemente o nivel intelixente de loxística e transporte internos na fábrica.
Característica
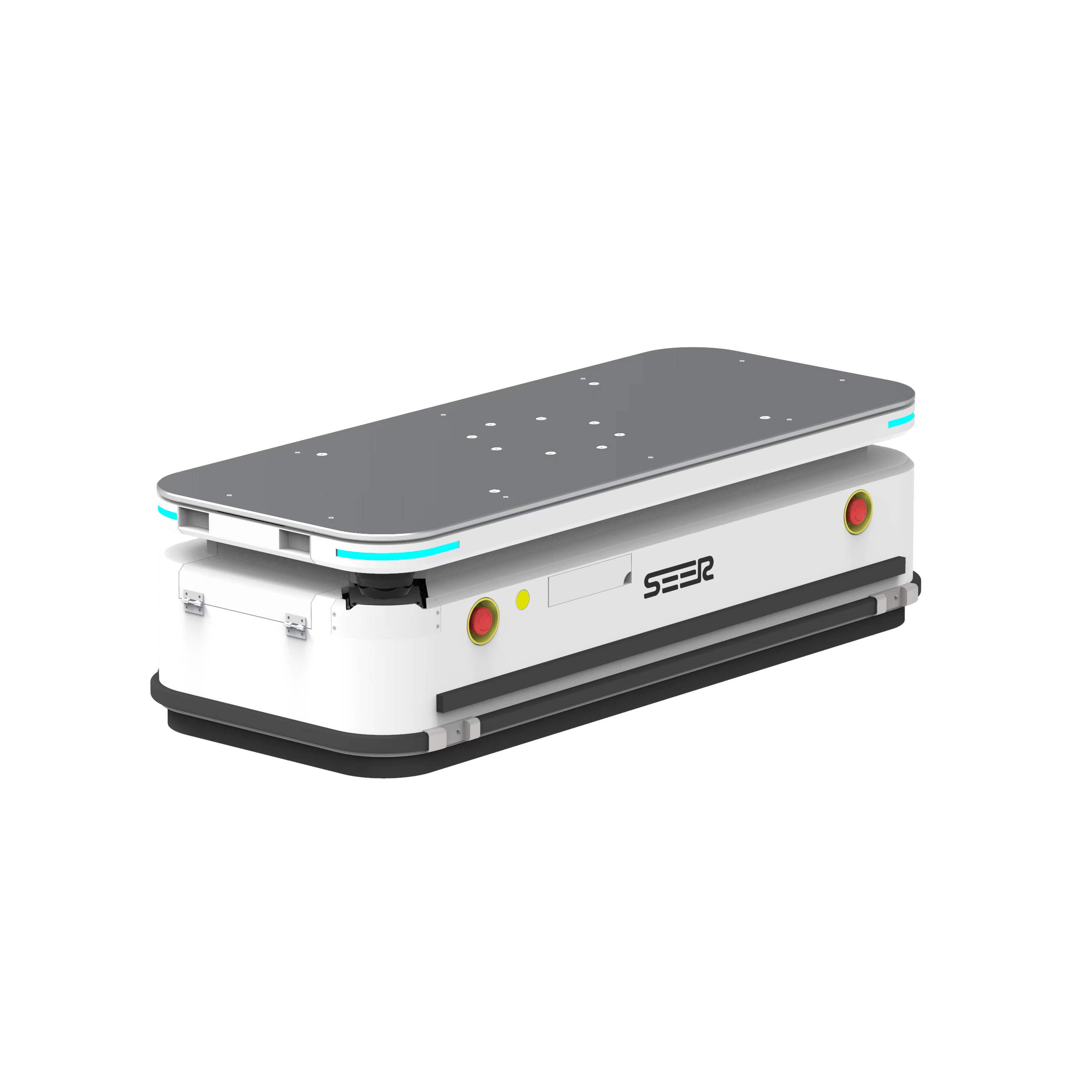
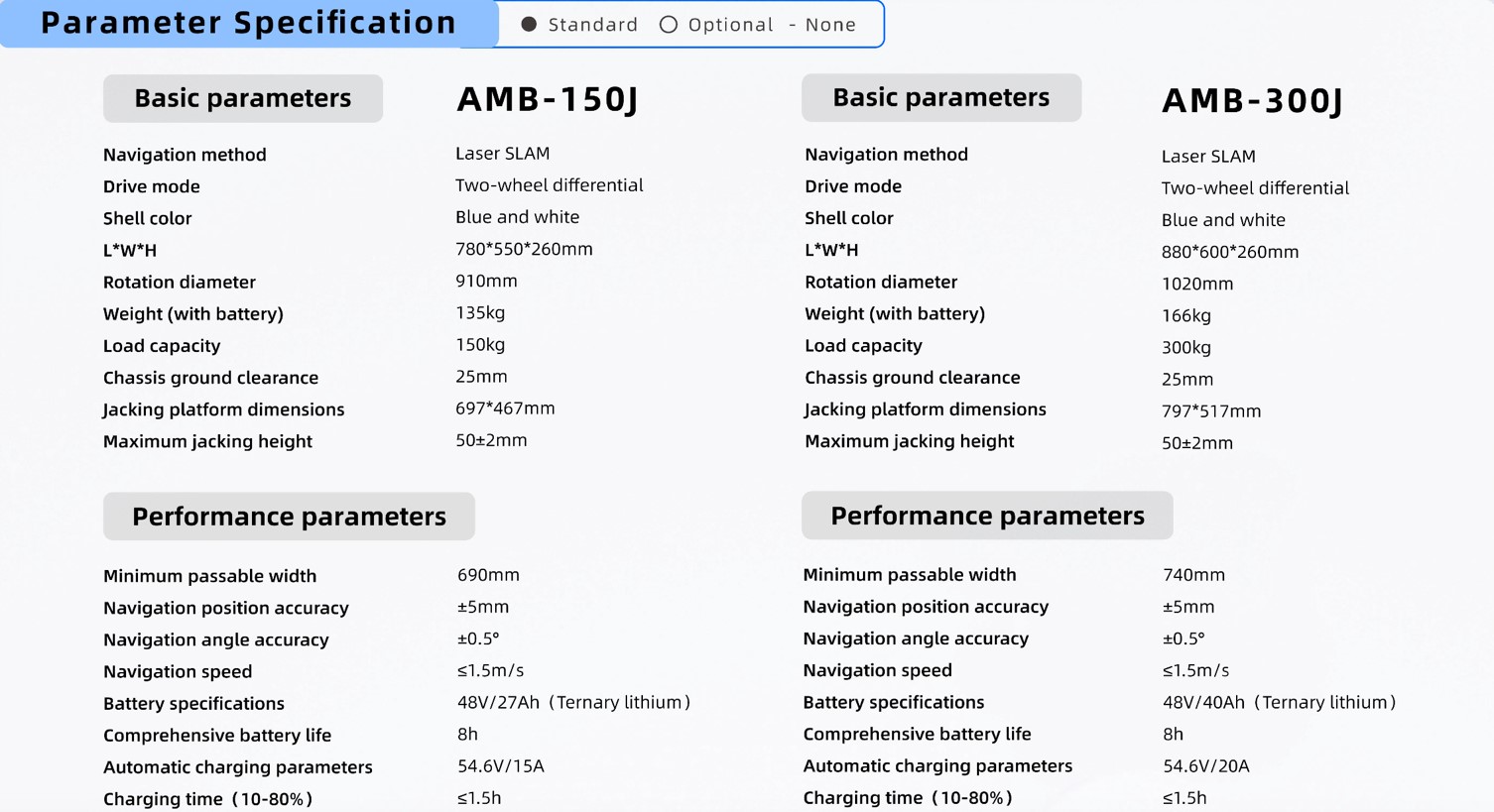
·capacidade de carga: 150 kg e 300 kg
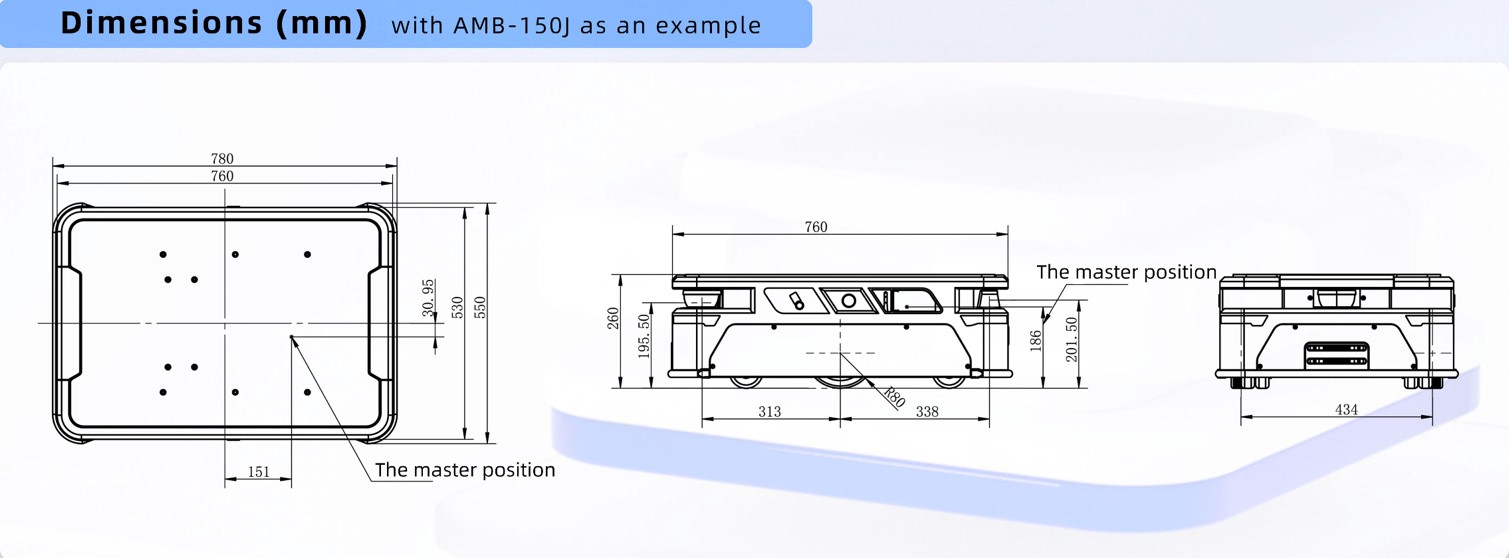
·altura máxima de elevación: 50 mm
·precisión da posición de navegación: ±5 mm
·precisión do ángulo de navegación: ±0,5°
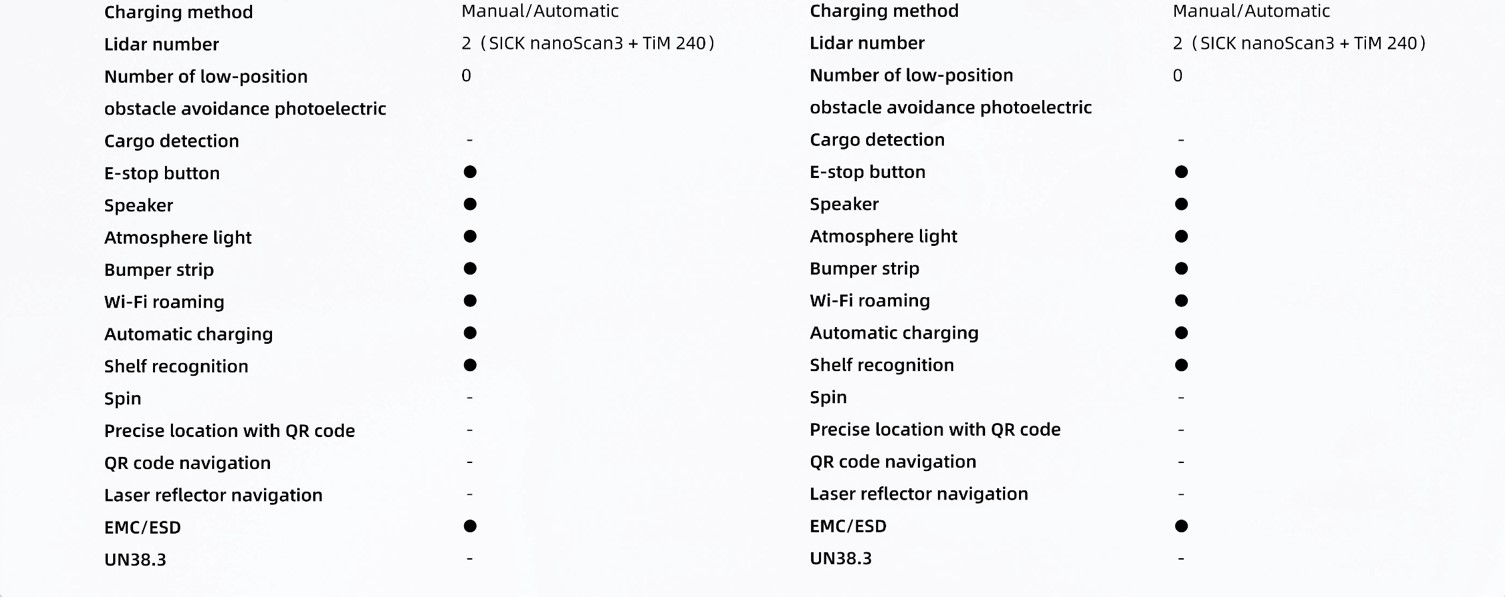
● Funcións ricas dispoñibles en calquera momento
As características estándar completas e excelentes e as funcións avanzadas ricas e prácticas axudan aos clientes a lograr facilmente unha loxística intelixente.
● Plataformas multiespecificación dispoñibles para expansión
Ofrece plataformas de 150 kg e 300 kg para satisfacer os requisitos de carga e escena de diferentes industrias. Tamén se pode usar con manipuladores, rolos, gatos elevados, tracción latente, panorámica/inclinación, pantallas de visualización, etc. para lograr múltiples aplicacións cun só chasis.
● ±5 mm, eficiente e preciso
O algoritmo SLAM láser utilízase para lograr unha localización de alta precisión, cunha precisión de localización repetida non reflectante do láser de ±5 mm, o que permite un acoplamento sen fisuras entre robots móbiles e humanos e un fluxo eficiente de cargas entre varios puntos. Nota: Os valores reais dependen das condicións ambientais.
● Navegación estable para maior seguridade e fiabilidade
A navegación láser SLAM, a navegación por reflector láser, a navegación por código QR e outros métodos de navegación están perfectamente integrados e cambiados sen problemas para garantir o funcionamento estable do robot móbil.
● Implementación sinxela e xestión visible
Unha ampla gama de software de apoio e sistemas dixitais pode realizar facilmente o funcionamento, a programación e a xestión da información dos robots móbiles e conectarse perfectamente co sistema MES da fábrica para lograr unha loxística realmente intelixente.
Produtos relacionados



Parámetro de especificación
O noso negocio


Categorías de produtos
-

Máquina de soldar de 6 eixes Lh1850-B-6 Automactic In...
-

Sistema automático eléctrico de navegación láser intelixente de 1000 kg...
-

Brazo robótico de 6 eixes Brazo robótico industrial Brazo robótico A...
-
Máquina de soldadura robótica industrial automática Ar...
-

Brazo robótico industrial de 6 eixes Szgh-I5 en colaboración...
-
Montaxe a baixo prezo, paletización, pulido, esprai...